

车用雷达驾驶场景仿真:通过多径效应、漫散射与微多普勒提升真实感
车用雷达驾驶场景仿真:通过多径效应、漫散射与微多普勒提升真实感
了解WaveFarer雷达仿真软件如何运用射线追踪技术,在包含车辆、道路设施、行人及其他物体的动态场景中,通过系统运动模拟虚拟驾驶环境并预测雷达回波信号。
驾驶场景仿真能为传感器设计的早期测试带来显著优势,并可作为实际道路测试的有效补充。然而,针对毫米波雷达传感器的仿真,要实现逼真的汽车场景仍面临诸多挑战:
• 近场条件使传统RCS(雷达散射截面)理论失效
• 高复杂度多面体车辆模型超出传统"传播式"射线追踪处理能力
• 路侧结构(护栏、标志牌、停放车辆等)导致的复杂多径效应
• 多车协同运动及可动部件构成的动态场景
这个演示将运用WaveFarer软件,系统性的阐述毫米波雷达仿真面临的挑战、潜在解决方案以及最新研发成果,重点涵盖三大关键技术领域:目标散射特性、多径与杂波干扰,以及运动微多普勒效应(例如行人行走时的肢体运动)。
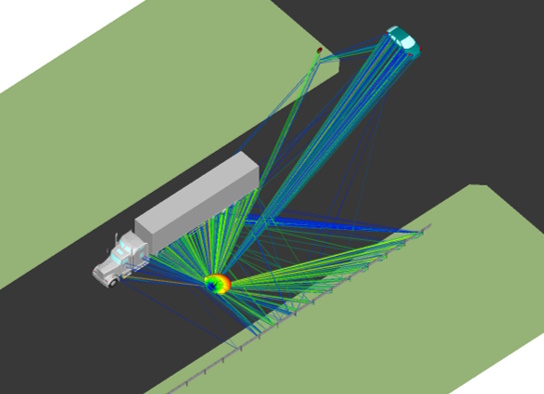
仅考虑物理光学散射(PO Scatter)与一致性绕射理论(UTD)相互作用
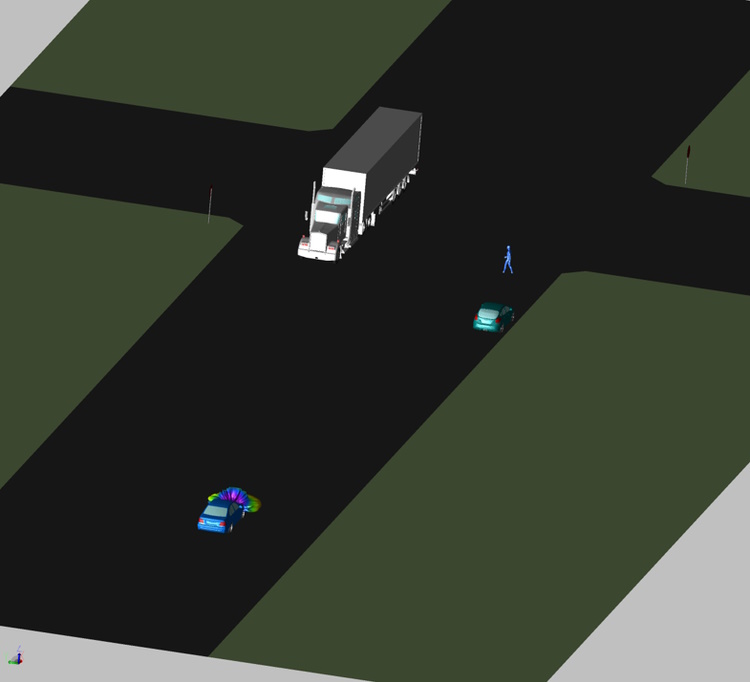
搭载雷达的车辆接近时的行人横穿场景
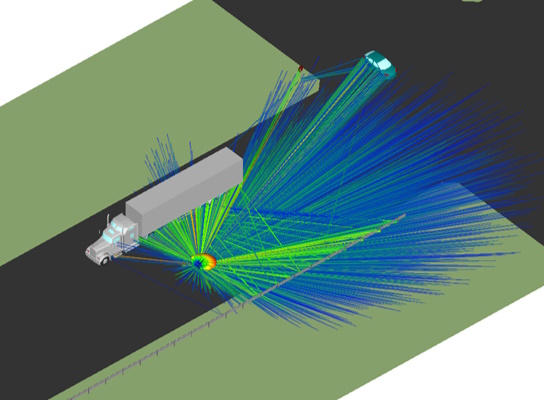
结合漫散射效应
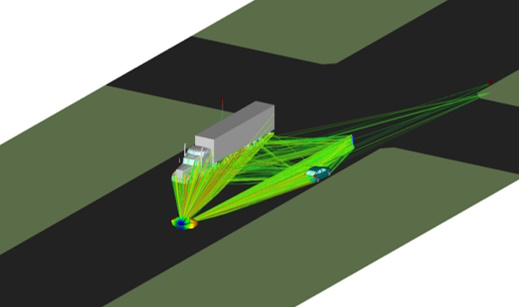
主要传播路径呈现与车辆、行人及停车标志的交互效应
本公司为旭好有限公司在台湾合作伙伴及关系企业,与旭好有限公司共同在台湾推展REMCOM 公司仿真软件业务,大陆访客也可以拜访南京任康科技网站并申请试用