

車用雷達駕駛場景仿真:通過多徑效應、漫散射與微多普勒提升真實感
車用雷達駕駛場景仿真:通過多徑效應、漫散射與微多普勒提升真實感
本公司為旭好有限公司在台灣合作夥伴及關係企業,與旭好有限公司共同在台灣推展REMCOM 公司模擬軟體業務,大陸訪客也可以拜訪南京任康科技網站瀏覽並申請試用
本案例協助用戶瞭解WaveFarer雷達仿真軟件如何運用射綫追踪技術,在包含車輛、道路設施、行人及其他物體的動態場景中,通過系統運動模擬虛擬駕駛環境並預測雷達回波信號。
駕駛場景仿真能爲傳感器設計的早期測試帶來顯著優勢,並可作爲實際道路測試的有效補充。然而,針對毫米波雷達傳感器的仿真,要實現逼真的汽車場景仍面臨諸多挑戰:
• 近場條件使傳統RCS(雷達散射截面)理論失效
• 高複雜度多面體車輛模型超出傳統"傳播式"射綫追踪處理能力
• 路側結構(護欄、標志牌、停放車輛等)導致的複雜多徑效應
• 多車協同運動及可動部件構成的動態場景
這個案例將運用WaveFarer軟件,系統性的闡述毫米波雷達仿真面臨的挑戰、潜在解决方案以及最新研發成果,重點涵蓋三大關鍵技術領域:目標散射特性、多徑與雜波干擾,以及運動微多普勒效應(例如行人行走時的肢體運動)。
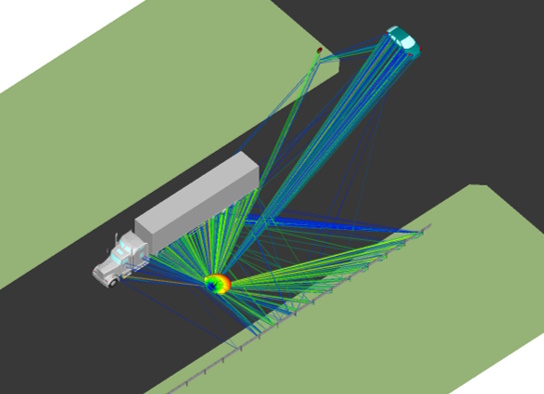
僅考慮物理光學散射(PO Scatter)與一致性繞射理論(UTD)相互作用
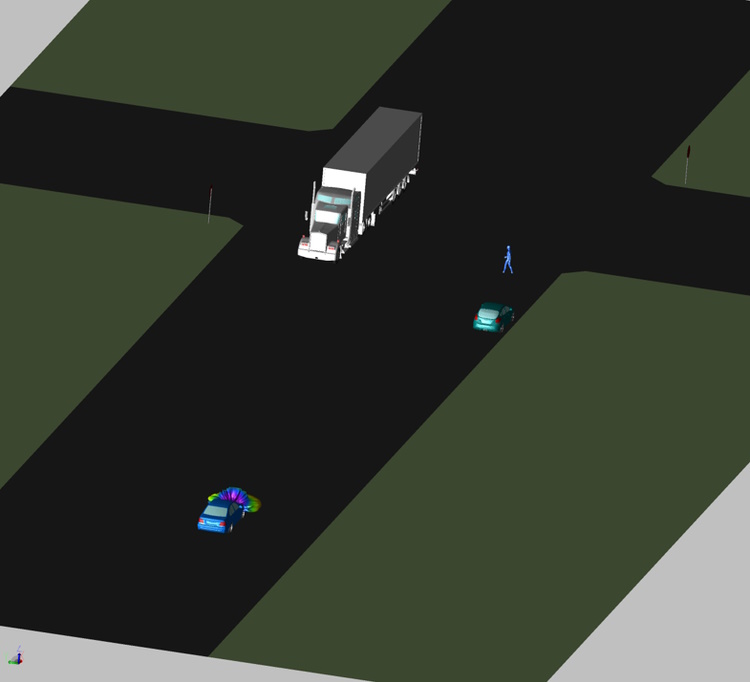
搭載雷達的車輛接近時的行人橫穿場景
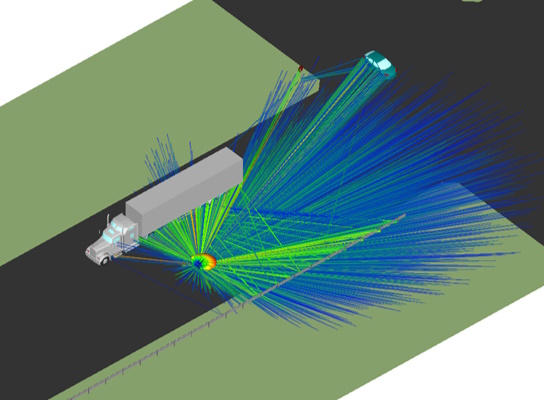
結合漫散射效應
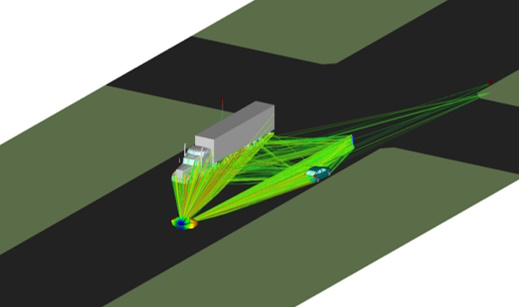
主要傳播路徑呈現與車輛、行人及停車標志的交互效應